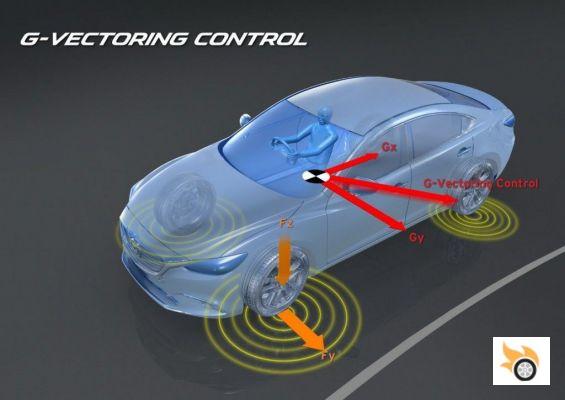
In theory, the ideal line for a curve is to reduce speed, reach the tangential point while maintaining speed, and then accelerate smoothly. In this way, the centrifugal force disturbs the car's balance less. The GVC takes care of just that, transparently to the driver. It is an electronic control over the throttle, which in modern cars is by means of electrical signals and not mechanically. That means that a control unit can accelerate more or less no matter what the pedal says.
When a car decelerates or brakes - physically the same thing - the weight is shifted to the front axle. At a constant speed, the weight is distributed evenly depending on how the vehicle is built. Finally, when accelerating, the weight tends to load the rear axle more and lighten the front axle. This is true for any type of vehicle, whether front-wheel drive, all-wheel drive or rear-wheel drive.
The GVC system watches the steering wheel to determine where the driver really wants to go. Based on this reading, the engine is instructed to generate less power (decelerate), maintain it, or increase it (accelerate). Thus, the weight is distributed in a more controlled way between the different wheels, and without using the brakes. Stability control acts on the brakes to restore the driver's desired trajectory, but it acts later. GVC is instantaneous.
In the many demonstration videos Mazda has released, it's clear that the system reduces roll, the steering becomes more precise (much less correction is required) and reduces understeer and oversteer at moderate speeds. The biggest difference is noticeable on slippery surfaces, such as snow or ice. The videos use front-wheel drive Mazda6s with standard, i.e. summer, tyres.
This may sound like total nonsense, but it makes perfect sense from a physics point of view. It doesn't make a huge difference to the principle of how ESP works, it simply acts earlier and only on the engine torque, not the brakes. Here is a short video in English, as they are not available in Spanish yet: