Porque é necessário
Vamos começar por esclarecer que o diferencial só é necessário nas rodas motrizes, pois são elas que conduzem o carro e, portanto, as que precisam de torque para transmitir ao solo.
Imaginemos que temos um carro sem diferencial, ou seja, as duas rodas motrizes estão rigidamente ligadas (como um kart). Estamos a conduzir em linha recta a uma velocidade constante, as rodas estão a rodar normalmente, e do lado esquerdo encontramos um pequeno galo de velocidade. Vejamos o eixo motor: a roda esquerda irá viajar alguns centímetros mais longe do que a sua companheira, pois tem de subir e descer para negociar a colisão. O que acontece? A roda direita, por percorrer menos distância, estará mais avançada que a outra, causando um pequeno torque para a esquerda. Portanto, estamos diante de um veículo que não tem boa estabilidade linear.
Nós já sentimos que algum mecanismo é necessário para remediar isto. Olhando para o exemplo seguinte, estaremos convencidos de que ele é essencial. Vamos imaginar o veículo de antes, a negociar uma curva. Como a roda externa (l2 na foto) deve percorrer mais metros que a roda interna (l1 na foto), e as rodas estão rigidamente conectadas, uma delas deve deslizar para manter as rotações das rodas. O mau, porque provocamos um tremendo desgaste do pneu e a estabilidade em curva não vai ser nada boa.
Para resolver estes dois problemas fundamentais, nasceu o diferencial.
Um pouco de história
Em 1876, as bicicletas estavam na sua infância. Os seus desenhos consistiam numa enorme roda dianteira e numa roda traseira muito pequena, o que os tornava difíceis de utilizar: era difícil entrar e sair deles, para não falar do estranho manuseamento da direcção com aquelas rodas grandes.
Em Coventry (Reino Unido), um homem chamado James Starley decidiu que o que era necessário era redesenhar a bicicleta, para que qualquer um pudesse entrar e sair dela facilmente. Foi assim que ele inventou o seu triciclo (você pode ver uma foto de James com a sua invenção). Ele colocou duas rodas grandes atrás, uma pequena à frente, e um assento confortável o suficiente para pedalar. Para o eixo do suporte inferior e seu pinhão, ele engrenou uma corrente que impulsionava o eixo traseiro com um pinhão. Uma revolução no design da bicicleta na altura. Quando construiu seu primeiro protótipo e saiu para testá-lo, percebeu imediatamente que algo estava errado: o triciclo era difícil de controlar em linhas retas, e em curvas era tão difícil de pedalar que não conseguia avançar.
James, sendo um bom inglês de Coventry, foi ao pub à noite para pensar na causa dos problemas da sua tribo. Depois de alguns pontos ele descobriu a falha: as duas rodas traseiras, estando ligadas por um eixo rígido, não conseguiam curvar correctamente devido à distância diferente que cada roda percorria. Foi necessário intercalar entre eles algum mecanismo para compensar o raio de viragem da roda exterior em relação à roda interior.
Após várias semanas de reflexão, ele finalmente teve uma ideia brilhante e construiu um protótipo. Ele montou-o imediatamente no seu triciclo e quando o testou ficou espantado com o seu comportamento. Ele tinha acabado de inventar o diferencial aberto. Assim, ao pedalar, o diferencial compensava as diferentes distâncias percorridas pelas rodas, mesmo em curva.
Dez anos mais tarde, quando Karl Benz estava construindo o primeiro carro do planeta - na verdade um triciclo motorizado - ele incluiu a invenção do Sr. Starley. Esse seria o primeiro carro a montar um diferencial.

Alguns historiadores indicam que quem realmente inventou o diferencial foi Onésiphore Pecqueur em 1827, embora se deva notar que o mecanismo diferencial em relógios astronômicos data de 200 a.C. como usado no mecanismo de Antikythera. O que é claro é que James Starley foi o primeiro a aplicá-lo num veículo.
Nos anos seguintes, a potência do motor aumentou e o diferencial de Starley não suportou tanto torque, então alguns fabricantes decidiram construir carros sem diferencial. Como isso é possível? Colocando simplesmente a tracção numa única roda traseira. Assim, a outra roda gira livremente e não há problemas de descompensação nas curvas; mas esta solução revelou-se ineficiente, especialmente em estradas de terra, bastante abundantes na época, diminuindo assim a tração, e tornando muito difícil avançar.
Foi aqui que entrou a Packard Motor Car Company de Detroit, aperfeiçoando o design da Benz e fazendo o primeiro diferencial de engrenagens cônicas em 1913. Isto fez com que a transmissão de energia fosse mais suave, bem como mais silenciosa. Em 1926, Packard introduziu a engrenagem hipóide (nada mais do que uma engrenagem biselada deslocada para baixo), com a qual ainda hoje usamos. Isto permite baixar o eixo de transmissão que liga a caixa de velocidades ao diferencial, para que este seja menos intrusivo no habitáculo. Praticamente todos os veículos com tracção traseira têm um diferencial de velocidade hipóide. Nos veículos com tração dianteira, a redução é feita com um único par de marchas.
Em 1958, Vernon Gleasman patenteou um novo diferencial, que melhorou as propriedades do diferencial aberto: nasceu o diferencial de escorregamento limitado de Torsen. Analisaremos estes tipos de diferenciais e suas funções com mais detalhes mais tarde.
Localização
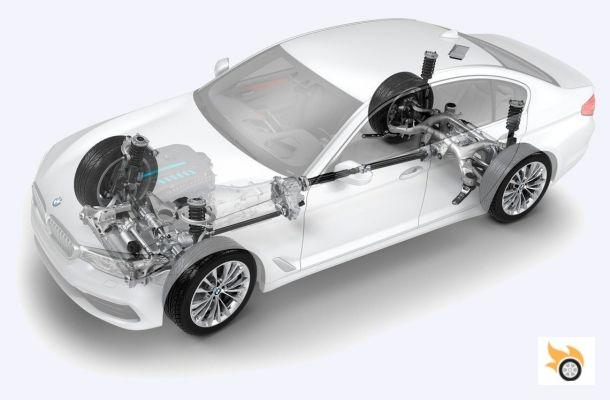
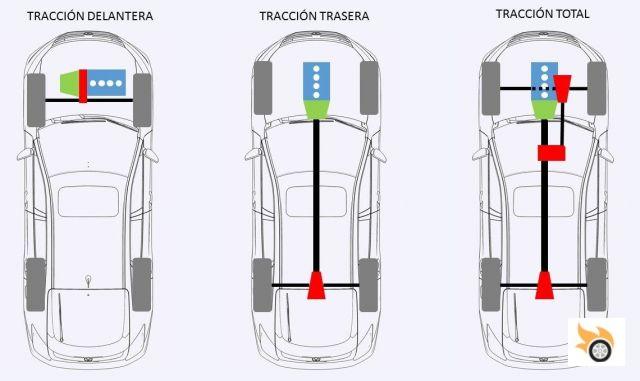
Antes de continuarmos, vamos visualizar onde o diferencial está localizado. Dependendo do tipo de tracção do carro, teremos de um a três diferenciais. Na imagem temos representado os três tipos mais comuns: frontal, traseira e total. Dentro destes pode haver variações, tais como um carro com motor transversal dianteiro com tracção integral (Ford Focus RS, Audi RS3), um com motor longitudinal e caixa de velocidades que incorpora a caixa de transferência, diferencial central e frontal (Subaru WRX, Audi RS4), etc. Para simplificar, vamos nos concentrar nos três da imagem.
Temos representado o motor em azul, a caixa de velocidades em verde, os eixos motrizes em preto e o diferencial em vermelho.
Num veículo com tracção às rodas dianteiras e motor transversal (a maioria dos actualmente no mercado), o diferencial está localizado entre o motor e a caixa de velocidades, mas atrás de ambos. Nesta configuração a engrenagem de redução não é hipóide, mas um simples par de engrenagens, como as que se encontram na caixa de velocidades. Ou seja, duas engrenagens de diâmetros diferentes.
Num veículo com tracção traseira, o diferencial é ligado à caixa de velocidades através do eixo de transmissão. Neste caso, descobrimos que o redutor é hipoide.
Num veículo de tracção integral teremos três diferenciais: o central, que é responsável por dividir o binário entre os eixos dianteiro e traseiro; e um diferencial em cada eixo, para distribuir o binário por cada roda. Além disso, é necessária uma caixa de transferência central, para distribuir o torque ao eixo dianteiro, que normalmente não tem redução, de modo que as engrenagens terão o mesmo tamanho. Normalmente, a embalagem é bastante complicada nesta configuração, por isso, em muitas ocasiões um dos eixos do eixo dianteiro tem de passar pelo cárter de óleo do motor, para chegar ao outro lado. É por isso que colocamos uma linha tracejada na fotografia.
Dependendo se o diferencial é central, dianteiro ou traseiro, o fabricante escolherá um ou outro tipo, uma vez que as suas qualidades variam.
Como é muito complicado entendê-lo de forma estática, lendo e olhando uma imagem, anexei um vídeo de 1937 que mesmo sendo muito antigo, acho que é de longe o mais claro na explicação:
Partes de um diferencial
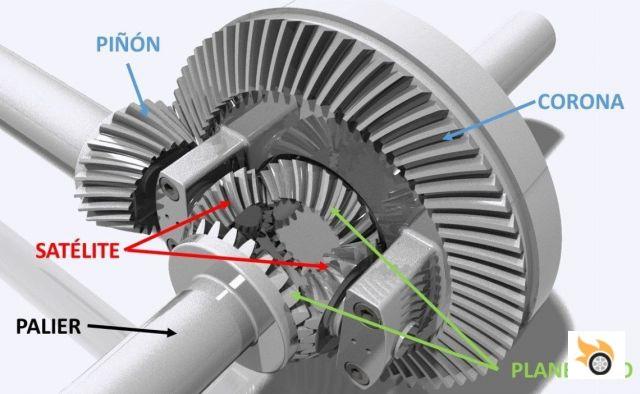
Na imagem abaixo pode ver um diferencial aberto - o montado na maioria dos carros - de um veículo com eixo motor traseiro.
Em azul vemos a engrenagem de redução, formada pelo pinhão que está preso ao eixo de acionamento que vem da caixa de câmbio, e a engrenagem anular, que está presa ao diferencial. Esta é a engrenagem hipóide (o eixo longitudinal do pinhão não coincide com o centro da engrenagem do anel). Para que é necessária esta engrenagem? Alterar a direcção da força em 90º e adaptar a rotação do motor à velocidade de rotação das rodas. Vamos ver isto em detalhe no próximo ponto.
As partes que desempenham a função diferencial como tais são os satélites (vermelho) e as engrenagens planetárias (verde). As engrenagens planetárias são rigidamente fixadas aos rolamentos que transmitem a potência a cada roda, enquanto os satélites giram livremente no seu eixo. Um dos planetários estará sempre preso à roda da coroa, estando ligado ao outro planetário por meio da engrenagem com os satélites.
Mais tarde vamos tentar explicar qual a função que cada parte desempenha.
Dispositivo de redução
Vamos agora dar uma olhada no equipamento de redução - pinhão e coroa na foto - e porque é necessário. A melhor maneira é usarmos um exemplo. Vamos fazer alguns cálculos simples, aproximando-nos dos números redondos, para não complicar demasiado.
Vamos supor que conduzimos o nosso carro com pneus 205/50 R17, na quinta mudança a 120 km/h, com o motor a 3000 RPM. Vamos supor que o desenvolvimento da quinta marcha é 1:1, uma marcha directa. A quantas rotações por minuto as rodas estão a rodar?
Vamos fazer alguns cálculos rápidos para descobrir. Primeiro calculamos o comprimento da circunferência das nossas rodas. O raio desses pneus é de aproximadamente 31,2 cm. Então, se multiplicarmos por 2 e por π obtemos um resultado próximo dos 2 metros. Portanto, com uma volta completa da roda, avançamos 2 metros. Agora mudamos as unidades da velocidade: 120 km/h é cerca de 33 m/s. Está quase lá.
Se dividirmos a velocidade, pelo comprimento da circunferência da roda, obtemos a frequência de rotação em Hertz (ciclos por unidade de tempo): 33 m/s por 2 m dá-nos um resultado de 16,5 Hz. Como 1 Hz é uma revolução por segundo, basta multiplicar por 60 segundos para obter as revoluções por minuto. O resultado é que as rodas giram a 1.000 RPM.
Vamos recapitular: temos o motor a girar a 3.000 RPM; a relação da engrenagem é de 1:1, então o eixo de transmissão também está girando a 3.000 RPM; mas as rodas estão girando a 1.000 RPM. O que precisamos? Uma engrenagem de redução que adapta as duas rotações. Se dividirmos a rotação do motor entre as rodas, obtemos uma proporção de 3:1. Ou seja, o anel terá três vezes mais dentes do que o pinhão. Uma relação de redução de 3:1 é bastante comum, embora seja variável em função das características de cada par motor-gearbox.
Conhecendo a relação de redução, o tamanho das rodas, a relação de transmissão e a rotação máxima do motor, podemos calcular a velocidade máxima teórica que um carro pode atingir, se tiver potência suficiente, não podemos esquecer a aerodinâmica. Portanto, se mudarmos os pneus padrão para outros de tamanho diferente, devemos ter cuidado com a escolha de forma a não alterar o desenvolvimento final.
A engrenagem de redução, apesar de estar embalada dentro da caixa do diferencial, não deve ser confundida com o próprio diferencial, pois tem uma função diferente, que é a de adaptar a rotação do motor à das rodas.
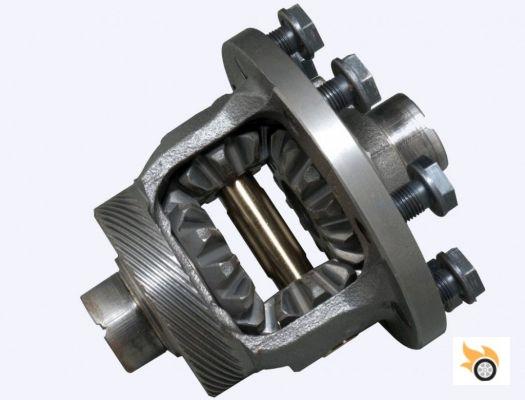
Como funciona
Na foto você pode ver um diferencial aberto, que vamos tomar como exemplo, porque é o mais comum. A coroa da engrenagem de redução seria colocada no lado esquerdo, onde se encontram os furos roscados. Portanto, todo o bloco diferencial gira junto com a roda da coroa. Se as duas rodas rodarem à mesma velocidade, as engrenagens planetárias rodarão à mesma velocidade e, consequentemente, os satélites permanecerão parados. Ou seja, rodam com o conjunto, mas não sobre si mesmos (rodam no eixo perpendicular ao seu eixo longitudinal).
Se uma roda gira a uma velocidade maior, devido a uma curva, tracção diferente ou um choque de velocidade, um planetário rodará mais rapidamente que o outro, e por isso agora os satélites rodam sobre si mesmos, e ao mesmo tempo rodam com o conjunto (no eixo perpendicular ao eixo axial, e no eixo longitudinal).
Agora que entendemos como funciona um diferencial, vamos ver que tipos existem e quais são as suas vantagens.
Tipos
Diferenciais abertos
É o diferencial que vimos na secção anterior. Cumpre as funções básicas de transmissão de torque para ambas as rodas igualmente, e compensa a diferença de rotação, embora tenha uma desvantagem um pouco problemática: quando uma das rodas tem menos aderência que a outra, todo o torque é dirigido para a roda que desliza, ou seja, aquela com menos aderência, o que significa que perdemos tração e, portanto, não avançamos.
Geralmente é incorporado na maioria dos veículos para ser de construção simples, econômico e robusto, portanto pode ir na frente ou atrás. Alguns exemplos: Nissan GT-R no eixo dianteiro, ou BMW nos seus modelos não "M", e praticamente em toda a tracção dianteira, algo aparentemente contraditório devido à sua abordagem desportiva: tradicionalmente, a Porsche sempre utilizou diferenciais abertos, excepto nos seus modelos mais extremos.
Tem uma transmissão teórica de torque entre rodas de 1:1 - na prática devido ao atrito, pode ser de aproximadamente 1,3:1 - também chamada TBR (Torque Bias Ratio), ou seja, um valor em porcentagem de 0%. O que é que isto significa? Que é incapaz de transmitir torque de uma roda para outra ao deslizar. Qualquer TBR maior que 1 significa que estamos lidando com um diferencial de deslizamento limitado, que "tira" o torque da roda deslizante e o "dá" para a outra roda.
Por exemplo, um diferencial com um TBR de 2:1 (33%) significa que uma roda pode ter 66,5% do torque desse eixo no máximo (seus 50% mais 33% dos outros 50%) e 33,5% no mínimo (50% - (33% * 50%)). Entre estes valores, a roda pode ter qualquer percentagem, dependendo do tipo de diferencial e da aderência da roda. Note que o conceito de TBR nasceu com os diferenciais Torsen, mas sendo um conceito intuitivo, ele é usado em todos os tipos de diferencial como um comparador de sua capacidade de transferência de torque. Uma calculadora rápida para equivalência entre TBR e porcentagem pode ser encontrada aqui.

Com fechadura
Para resolver em grande parte o problema anterior de perda de tração, foi acrescentada uma trava (mecânica, hidráulica, pneumática ou eletrônica) ao diferencial aberto, especificamente para os satélites. Como estão bloqueadas e não podem girar sozinhas, transmitem 50% da potência a cada roda, ao custo de não realizar a função diferencial. Por este motivo, este tipo de diferencial é incorporado em veículos com capacidades todo-o-terreno, sendo recomendada a sua utilização a uma velocidade muito baixa, para ultrapassar um obstáculo, uma vez que as rodas giram em conjunto.
Dependendo do fabricante, esta fechadura pode ser incorporada a um, dois ou todos os três diferenciais. Possui uma TBR 1:1, sendo diferenciais abertos, incapazes de subtrair o torque à roda deslizante. Um vídeo muito interessante, descoberto pelo mestre Javier, mostra o funcionamento do Audi Ur-Quattro, com três diferenciais abertos, dois deles bloqueáveis. Você pode vê-lo em "O princípio de Quattro".
Este diferencial resolve algumas das deficiências do diferencial aberto, mas apenas a baixa velocidade. E se houvesse algum tipo de diferencial que, além de compensar a rotação das rodas, transmitisse o torque de forma variável, dependendo da aderência para melhorar a tração? As diferenças de deslizamento limitado (LSD) são a resposta.
Diferencial de escorregamento limitado (LSD)
Esta secção pode ser objecto de toda uma enciclopédia, devido à variedade de auto-travamento ou aos diferenciais de escorregamento limitados. Vamos resumi-lo o mais possível para que seja compreensível. Podemos usar critérios diferentes para classificar os diferenciais. Vamos dividi-los em quatro tipos:
- Tipo de embreagem
- Tipo viscoso
- Tipo Rígido
- Tipo ativo
Diferencial do tipo de embreagem
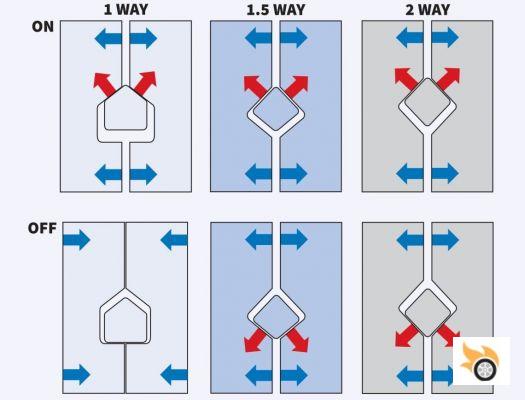
Este diferencial é um pouco complicado de explicar, vamos tentar ser tão claros quanto possível. Partimos de um diferencial aberto com o eixo do satélite e seus planetários, mas faremos algo diferente: o eixo do satélite terá uma pequena folga na carcaça, onde esculpiremos algo como um triângulo. Nos lados dos planetários, vamos colocar alguns discos de fricção presos à caixa diferencial, e ensanduichados entre eles, alguns discos de aço presos ao planetário. Como os discos estão intercalados, teremos que incorporar uma mola de pressão que os engata, para que as rodas recebam torque.
Desta forma, quando uma das rodas gira mais que a outra, é gerada uma força para que a cunha dos discos planetários empurre os discos de ambos os lados, bloqueando o diferencial. Estes discos não são mais do que uma embraiagem que, quando engatada, funciona como um diferencial bloqueado. Em situação normal, ao girar, os discos deslizam uns contra os outros permitindo que uma roda gire mais rápido que a outra. Como um vídeo vale por mil imagens, aqui está uma com a explicação.
Dependendo da forma do corte da carcaça, podemos falar de diferenciais de 1, 1,5 ou 2 vias. Os diferenciais de 1 via funcionam apenas em aceleração. Os diferenciais de 1,5 vias funcionam em aceleração e muito pouco em travagem. Os diferenciais de 2 vias funcionam igualmente bem em aceleração e travagem e não são recomendados na estrada, devido aos problemas de estabilidade que colocam ao travar.
São normalmente utilizados em carros desportivos como diferencial traseiro, embora existam algumas excepções. Merece menção especial o diferencial de coroa Audi, utilizado em alguns modelos Quattro, como o RS4 ou o RS5. É usado como um diferencial central e é baseado no mesmo princípio do diferencial do disco, com algumas pequenas variações, atingindo neste caso um TBR de 1.667:1.
Dependendo do material de fricção dos discos, eles podem ter diferentes TBR. Pode variar de 2:1 (33 %) a 400:1 (99,5 %), ou até mais. Este tipo de diferenciais são utilizados pela BMW nos seus veículos "M", e em competição. Deixo-lhe um vídeo onde pode ver a comparação entre um diferencial aberto, outro LSD a 25% (TBR de 1.667:1) e o diferencial do disco. A desvantagem deste diferencial é que o acoplamento é um pouco áspero e requer manutenção, devido ao desgaste dos discos. Como vantagem, podemos mencionar que seu TBR pode variar de 2 a 400, dependendo da aderência de cada roda.
Diferencial de acoplamento Viscous ou Ferguson
Trata-se de uma série de discos, cada um deles acoplado a um eixo - primário ou de entrada e secundário ou de saída - e imerso num fluido viscoso, normalmente com um elevado teor de silício. Quando o eixo primário desliza, começa a rodar a uma velocidade superior, aumentando a viscosidade do fluido e, portanto, acoplando os discos, ou seja, bloqueando o diferencial. Com este tipo de diferencial, o veículo comporta-se como se fossem duas rodas motrizes, pois só trava e transmite força para o outro eixo quando o eixo primário desliza.
É normalmente usado como diferencial central e sua TBR é variável dependendo do número de discos, seu material e tamanho. Se você tem tempo e quer entender melhor, deixo alguns vídeos de Lancia (parte 1 e parte 2), eles o usaram como diferencial central em seu Delta e Prisma 4×4.
Diferencial de tipo rígido
Embora exista o diferencial epicicloidal ou planetário, que também pode realizar a distribuição do torque (como no Toyota Prius, para distribuir a potência do motor térmico entre o gerador elétrico e as rodas), eu pessoalmente não conheço nenhum veículo que tenha um diferencial deste tipo como diferencial de eixo motor. Portanto, vamos nos concentrar no diferencial tipo Torsen, amplamente utilizado em muitos veículos.
Como mencionado, o diferencial de Torsen (sensor de torque) foi patenteado em 1958, e sua patente expirou em 1978, vinte anos depois. Quando a patente expirou, o desenho foi liberado para que qualquer pessoa pudesse usar; embora os proprietários da patente tenham registrado a marca "Torsen", portanto nenhum fabricante de diferenciais deste tipo pode usar este nome. É por isso que já ouviu falar de Quaife, Wavetrac, Eaton diferenciais... mas são definitivamente Torsen. Vamos ver como funciona.
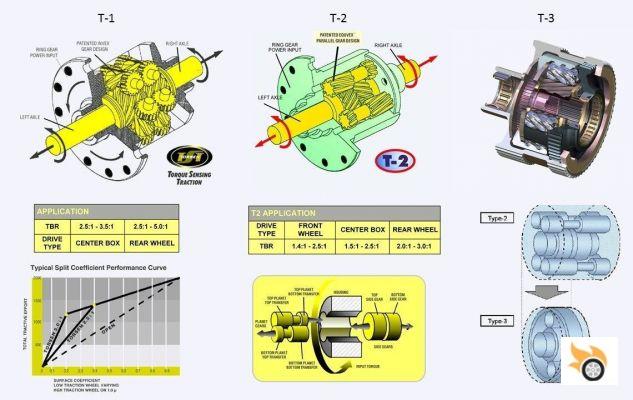
Existem basicamente dois tipos de diferencial de Torsen: o T-1 e o T-2. A diferença é que no T-1 os satélites são colocados perpendicularmente ao eixo diferencial, enquanto no T-2 são colocados em paralelo. Existem também as variantes T-2R (para competição) e T3 (mais compactas), mas são apenas uma evolução do T-2.
O que é que o Torsen fornece? Enquanto os outros diferenciais de auto-travamento dependem de uma condição para começar a trabalhar, o Torsen trabalha continuamente, fazendo a transição de torque suavemente de uma roda para a outra. O acoplamento é rígido e contínuo, por isso não há descontinuidades no seu funcionamento como no disco ou no viscoso. A manutenção neste tipo de diferencial é limitada à troca do óleo após o intervalo programado. Lembre-se que no diferencial do disco, também é necessário mudar os discos de fricção devido ao desgaste.
O T-1 tem uma operação mais dura, embora resista a mais torque do que o T-2. Por esta razão pode ter um TBR de 2.5:1 a 5:1. Em contraste, o T-2 é mais suave e silencioso, tornando as transições mais suaves e previsíveis. O seu TBR varia de 1.4:1 a 3:1.
O T-3 tem a particularidade de inicialmente distribuir mais torque para um dos dois eixos. É por isso que é utilizado como diferencial central, fazendo uma distribuição inicial 65:35 entre o eixo dianteiro e traseiro. A Audi já a utilizou muito em seus modelos Quattro com motor longitudinal, mas agora introduziu o diferencial central da coroa, do qual falamos antes. Normalmente este fabricante utiliza um diferencial aberto no eixo dianteiro, um T-3 como central e um T-2 na retaguarda. Um diferencial auto-travante não é normalmente utilizado no eixo dianteiro, pois induziria esforços parasitas na direcção (binário de direcção), a maioria dos fabricantes opta por um aberto; embora existam excepções, como o Opel Astra OPC, que monta um LSD de disco. O Nissan Juke Nismo RS que testamos no ano passado sofre deste efeito parasitário na direção.
Como desvantagem, temos de mencionar a condição de não aderência (roda em voo). Neste caso, o diferencial de Torsen comporta-se como um diferencial aberto. Ou seja, enviará todo o torque para a roda que está no ar, perdendo a tração. Para evitar esta condição, a Wavetrac concebeu um diferencial de Torsen com pré-carga, o que evita precisamente isto.
Diferenciais ativos
Nos últimos tempos, a electrónica invadiu tudo, e os diferenciais não podiam ser menos. Vamos listar os três tipos mais importantes de diferenciais ativos.
Haldex
O diferencial Haldex pode ser o mais famoso de todos eles. Basicamente é um diferencial como um diferencial de disco, com discos de fricção colados entre eles, onde o travamento é gerenciado por uma pequena bomba de óleo que introduz ou remove a pressão nos discos, de modo a travar ou não o diferencial. Esta bomba é gerida electronicamente, portanto, poderíamos defini-la como uma embraiagem electro-hidráulica controlada electronicamente.
A embreagem Haldex foi a que democratizou a tração nas quatro rodas em veículos com motor transversal. Lembre-se do Volkswagen 4Motion ou da tração Quattro do Audi A3 e TT.
Como os viscosos, o Haldex é usado como um diferencial central, e os carros se comportam como tração nas duas rodas (geralmente tração dianteira). Quando ocorre uma condição de baixa aderência, usando os sensores do carro, o fecho Haldex é activado, passando o binário para o eixo traseiro. Nas primeiras versões esta transferência foi feita de uma forma algo abrupta, exigindo um deslizamento notável do eixo dianteiro para entrar em acção. Está actualmente na sua quinta geração, tendo aperfeiçoado e antecipado o seu funcionamento, tornando-o praticamente imperceptível para o condutor quando entra em acção.
Eletrônica com vetorização de torque ou controle de vetorização de torque
Há outra modalidade que está sendo imposta na gama de carros esportivos de alto desempenho. Este diferencial, bastante complexo e pesado, é uma versão duplicada do Haldex, mas para ser usado no eixo motor traseiro. Em ambos os lados do diferencial estão os discos, que por sua vez estão conectados a uma válvula e a uma bomba de óleo controlada eletronicamente. Quando a eletrônica considera que é necessário mais torque na roda direita (canto esquerdo, por exemplo), ela ativa a válvula daquele lado e a bomba dá um chute, enviando mais pressão para os discos da direita, fazendo com que mais torque seja transmitido para aquela roda. Exactamente o mesmo pode ser feito com a roda oposta. Então é como ter duas embraiagens de Haldex, cada uma ligada a um meio eixo.
Estes diferenciais são muito úteis, já que você pode regular com muita precisão quando ativá-lo e quanto torque é enviado para cada roda. Por outro lado, o custo, o peso e o desgaste são pontos contra eles. Deve-se notar também que em condições de operação muito exigentes, devido ao atrito dos discos e à alta pressão do óleo, eles podem superaquecer e parar de executar sua função, até que a temperatura de serviço seja recuperada. Você pode ver um vídeo com este tipo de diferencial em operação abaixo:
Virtual
Finalmente, temos os diferenciais virtuais de auto-travamento. Esta é a versão mais barata de um LSD, pois é baseada num diferencial aberto e no accionamento dos travões. Como funciona? Vamos lembrar que o diferencial aberto tinha a desvantagem de enviar mais torque para a roda que mais deslizava, exatamente o oposto do que queremos. Através da electrónica, este deslizamento é detectado, e os travões são activados apenas na roda que escorrega. Automaticamente o diferencial aberto enviará mais torque para a outra roda, pois oferece menos resistência do que a que é freada.
A sua principal desvantagem é que produz mais fadiga no sistema de travagem, especialmente no uso pesado. Foi concebido para um uso mais esporádico, poupando o peso e o consumo dos diferenciais dos tipos descritos acima.
É algo muito inteligente e económico, pois pode ser utilizado em qualquer veículo actual. Na verdade, quando vemos um veículo com vetor de torque anunciado - exceto para aqueles que usam um diferencial ativo - nada mais é do que o que acabamos de ver: um diferencial aberto com deslizamento limitado através de frenagem seletiva. Este tipo é utilizado maciçamente na maioria dos veículos do segmento SUV. Você pode vê-lo em funcionamento no caso do Porsche 718 Cayman:
Como revisão, mencione que a frenagem seletiva também pode ser realizada, mesmo que tenhamos um LSD, para acentuar o torque. É usado pela Audi em alguns dos seus modelos Quattro.
Tanto pela nossa revisão deste dispositivo que, como viram, é essencial ter boa tracção nos nossos veículos, e compensar as diferenças de rotação das rodas motrizes. Sei que deixamos muitos detalhes no tinteiro, mas a idéia era ter uma visão geral sobre seu funcionamento e as diferentes opções oferecidas pelos fabricantes para resolver várias situações que podemos enfrentar, como avançar na neve, ou sair mais rápido de uma curva em um circuito com o acelerador máximo.
Em conclusão, podemos dizer que um bom diferencial de auto-travamento pode tornar a condução muito mais divertida e eficaz do que um diferencial aberto, que no final é o que procuramos quando conduzimos. É por isso que somos pistonudos.