Pourquoi c'est nécessaire
Commençons par préciser que le différentiel n'est nécessaire que sur les roues motrices, car ce sont elles qui entraînent la voiture, et donc celles qui ont besoin de transmettre un couple au sol.
Imaginons que nous ayons une voiture sans différentiel, c'est-à-dire que les deux roues motrices soient reliées de manière rigide (comme un kart). Nous roulons en ligne droite à une vitesse constante, les roues tournent normalement, et sur le côté gauche nous trouvons un petit dos d'âne. Prenons l'exemple de l'essieu moteur : la roue gauche se déplacera de quelques centimètres de plus que sa compagne, car elle doit monter et descendre pour franchir la bosse. Que se passe-t-il ? La roue droite, comme elle parcourt moins de distance, sera plus en avant que l'autre, provoquant un petit couple à gauche. Par conséquent, nous sommes confrontés à un véhicule qui n'a pas une bonne stabilité linéaire.
Nous sentons déjà qu'un mécanisme est nécessaire pour y remédier. En regardant l'exemple suivant, nous serons convaincus qu'elle est essentielle. Imaginons le véhicule d'avant, négociant un virage. Étant donné que la roue extérieure (l2 sur la photo) doit parcourir plus de mètres que la roue intérieure (l1 sur la photo), et que les roues sont reliées de manière rigide, l'une d'entre elles doit glisser pour maintenir les révolutions des roues. Mauvaise chose, car nous provoquons une usure énorme du pneu, et la stabilité en courbe ne va pas être bonne du tout.
Pour résoudre ces deux problèmes fondamentaux, le différentiel est né.
Un peu d'histoire
En 1876, les bicyclettes en étaient à leurs débuts. Leurs conceptions consistaient en une énorme roue avant et une très petite roue arrière, ce qui les rendait difficiles à utiliser : il était difficile d'y monter et d'en descendre, sans parler de l'étrange maniement de la direction avec ces grandes roues.
À Coventry (Royaume-Uni), un homme du nom de James Starley a décidé qu'il fallait revoir la conception de la bicyclette, afin que tout le monde puisse y monter et en descendre facilement. C'est ainsi qu'il a inventé son tricycle (vous pouvez voir une photo de James avec son invention). Il a mis deux grandes roues à l'arrière, une petite à l'avant, et un siège assez confortable pour pédaler. Sur l'axe du pédalier et son pignon, il a engrené une chaîne qui propulse l'axe arrière avec un pignon. Une révolution dans la conception des vélos à l'époque. Lorsqu'il a construit son premier prototype et qu'il l'a testé, il s'est immédiatement rendu compte que quelque chose n'allait pas : le tricycle était difficile à contrôler en ligne droite, et dans les virages, il était si difficile de pédaler qu'il était incapable d'avancer.
James, en bon Anglais de Coventry, est allé au pub le soir pour réfléchir à la cause des problèmes de son trike. Après quelques pintes, il a découvert le problème : les deux roues arrière, reliées par un essieu rigide, ne pouvaient pas prendre les virages correctement en raison de la distance différente parcourue par chaque roue. Il était nécessaire d'intercaler entre elles un mécanisme permettant de compenser le rayon de braquage de la roue extérieure par rapport à la roue intérieure.
Après plusieurs semaines de réflexion, il a finalement eu une idée brillante et a construit un prototype. Il l'a immédiatement monté sur son tricycle et lorsqu'il l'a testé, il a été étonné par son comportement. Il venait d'inventer le différentiel ouvert. Ainsi, en pédalant, le différentiel compensait les différentes distances parcourues par les roues, même dans les virages.
Dix ans plus tard, lorsque Karl Benz a construit la première voiture de la planète - en fait un tricycle motorisé - il a inclus l'invention de M. Starley. Ce serait la première voiture à monter un différentiel.

Certains historiens indiquent que celui qui a réellement inventé le différentiel est Onésiphore Pecqueur en 1827, bien qu'il faille noter que le mécanisme différentiel dans les horloges astronomiques remonte à 200 avant J.-C., comme utilisé dans le mécanisme d'Antikythera. Ce qui est clair, c'est que James Starley a été le premier à l'appliquer dans un véhicule.
Dans les années qui ont suivi, la puissance des moteurs a augmenté et le différentiel de Starley ne pouvait pas supporter un tel couple, si bien que certains constructeurs ont décidé de construire des voitures sans différentiel. Comment est-ce possible ? En mettant simplement l'entraînement sur une seule roue arrière. De cette façon, l'autre roue tourne librement, et il n'y a pas de problèmes de décompensation dans les virages ; mais cette solution s'est avérée inefficace, surtout sur les chemins de terre, assez abondants à l'époque, diminuant ainsi la traction, et rendant très difficile d'avancer.
C'est là qu'intervient la Packard Motor Car Company de Detroit, qui perfectionne le concept de Benz et fabrique le premier différentiel à engrenage conique en 1913. La transmission de la puissance est ainsi plus souple et plus silencieuse. En 1926, Packard a introduit l'engrenage hypoïde (rien de plus qu'un engrenage conique décalé vers le bas), que nous utilisons encore aujourd'hui. Cela permet d'abaisser l'arbre de transmission qui relie la boîte de vitesses au différentiel, afin qu'il soit moins intrusif dans l'habitacle. Pratiquement tous les véhicules à propulsion arrière ont un différentiel à engrenages hypoïdes. Sur les véhicules à traction avant, la réduction se fait avec une seule paire d'engrenages.
En 1958, Vernon Gleasman fait breveter un nouveau différentiel, qui améliore les propriétés du différentiel ouvert : le différentiel à glissement limité Torsen est né. Nous examinerons plus en détail ces types de différentiels et leurs fonctions par la suite.
Localisation
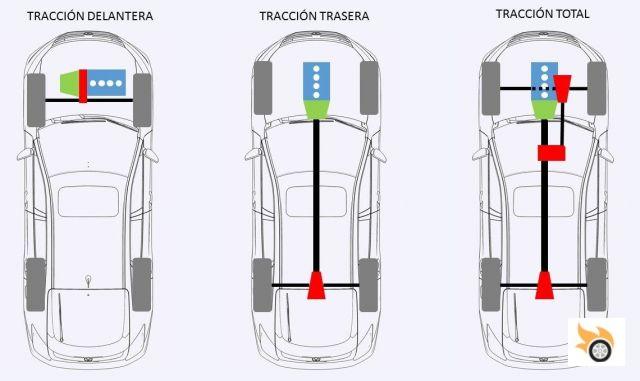
Avant de continuer, visualisons où se trouve le différentiel. En fonction du type de traction de la voiture, nous aurons de un à trois différentiels. Dans l'image, nous avons représenté les trois types les plus courants : avant, arrière et total. Au sein de ceux-ci, il peut y avoir des variations, comme une voiture avec moteur transversal avant avec transmission intégrale (Ford Focus RS, Audi RS3), une avec moteur longitudinal et boîte de vitesses qui incorpore la boîte de transfert, le différentiel central et avant (Subaru WRX, Audi RS4), etc. Pour simplifier, nous nous concentrerons sur les trois dans l'image.
Nous avons représenté le moteur en bleu, la boîte de vitesses en vert, les arbres de transmission en noir et le différentiel en rouge.
Dans un véhicule à traction avant et à moteur transversal (la plupart de ceux actuellement sur le marché), le différentiel est situé entre le moteur et la boîte de vitesses, mais derrière les deux. Dans cette configuration, le réducteur n'est pas hypoïde, mais une simple paire d'engrenages, comme ceux que l'on trouve dans la boîte de vitesses. C'est-à-dire deux engrenages de diamètres différents.
Dans un véhicule à roues arrière motrices, le différentiel est relié à la boîte de vitesses par l'intermédiaire de l'arbre d'entraînement. Dans ce cas, nous constatons que le réducteur est hypoïde.
Dans un véhicule à transmission intégrale, nous aurons trois différentiels : le différentiel central, qui est chargé de répartir le couple entre les essieux avant et arrière, et un différentiel sur chaque essieu, pour distribuer le couple à chaque roue. En outre, une boîte de transfert centrale est nécessaire pour distribuer le couple à l'essieu avant, qui n'a généralement pas de réduction, de sorte que les engrenages seront de la même taille. Normalement, l'emballage est assez compliqué dans cette configuration, si bien qu'en de nombreuses occasions, l'un des arbres de l'essieu avant doit passer par le carter d'huile du moteur, afin d'atteindre l'autre côté. C'est pourquoi nous avons mis une ligne en pointillés dans l'image.
Selon que le différentiel est central, avant ou arrière, le constructeur choisira un type ou l'autre, car leurs qualités varient.
Comme il est très compliqué de le comprendre de manière statique, en lisant et en regardant une photo, je joins une vidéo de 1937 qui, même en étant très ancienne, me semble être de loin la plus claire dans l'explication :
Parties d'un différentiel
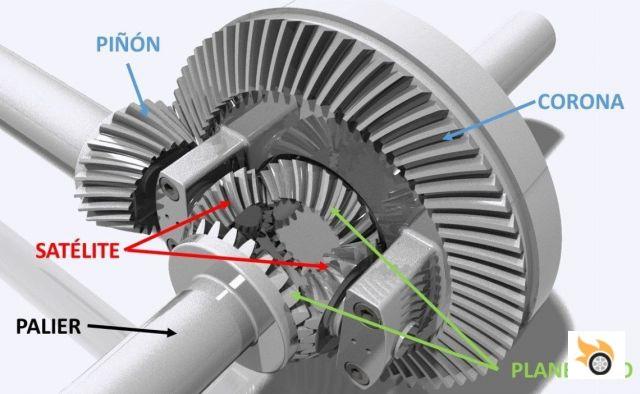
Dans l'image ci-dessous, vous pouvez voir un différentiel ouvert - celui monté dans la plupart des voitures - d'un véhicule à essieu moteur arrière.
En bleu, nous voyons le réducteur, formé par le pignon qui est fixé à l'arbre d'entraînement provenant de la boîte de vitesses, et la couronne, qui est fixée au différentiel. C'est l'engrenage hypoïde (l'axe longitudinal du pignon ne coïncide pas avec le centre de la couronne). À quoi sert cet engrenage ? Pour changer la direction de la force de 90º et adapter la rotation du moteur à la vitesse de rotation des roues. Nous verrons cela en détail dans le point suivant.
Les pièces qui assurent la fonction différentielle proprement dite sont les satellites (rouge) et les engrenages planétaires (vert). Les engrenages planétaires sont rigidement fixés aux roulements qui transmettent la puissance à chaque roue, tandis que les satellites tournent librement sur leur axe. L'un des planétaires sera toujours fixé à la couronne, étant relié à l'autre planétaire par le biais de l'engrenage avec les satellites.
Nous essaierons plus tard d'expliquer la fonction de chaque partie.
Réducteur
Voyons maintenant le réducteur - pignon et couronne sur l'image - et pourquoi il est nécessaire. La meilleure façon de procéder est d'utiliser un exemple. Faisons quelques calculs simples, en arrondissant les chiffres pour ne pas trop compliquer les choses.
Supposons que nous conduisions notre voiture avec des pneus 205/50 R17, en cinquième vitesse à 120 km/h, avec un moteur tournant à 3000 tours/minute. Supposons que le développement de la cinquième vitesse soit de 1:1, direct. À combien de tours par minute les roues tournent-elles ?
Faisons quelques calculs rapides pour le savoir. Tout d'abord, nous calculons la longueur de la circonférence de nos roues. Le rayon de ces pneus est d'environ 31,2 cm. Ainsi, si on multiplie par 2 et par π, on obtient un résultat proche de 2 mètres. Par conséquent, avec un tour complet de la roue, nous avançons de 2 mètres. Maintenant, nous changeons les unités de la vitesse : 120 km/h correspond à environ 33 m/s. On y est presque.
Si nous divisons la vitesse, par la longueur de la circonférence de la roue, nous obtenons la fréquence de rotation en Hertz (cycles par unité de temps) : 33 m/s par 2 m nous donne un résultat de 16,5 Hz. Comme 1 Hz correspond à une révolution par seconde, il suffit de multiplier par 60 secondes pour obtenir les révolutions par minute. Le résultat est que les roues tournent à 1 000 tours par minute.
Récapitulons : le moteur tourne à 3 000 tr/min ; le rapport de démultiplication est de 1:1, donc l'arbre de transmission tourne également à 3 000 tr/min ; mais les roues tournent à 1 000 tr/min. De quoi avons-nous besoin ? Un réducteur qui adapte les deux rotations. Si nous divisons la rotation du moteur entre les roues, nous obtenons un rapport de 3:1. C'est-à-dire que la couronne aura trois fois plus de dents que le pignon. Un rapport de réduction de 3:1 est assez courant, bien qu'il soit variable en fonction des caractéristiques de chaque couple moteur-boîte de vitesses.
En connaissant le rapport de réduction, la taille des roues, le rapport de vitesse et la rotation maximale du moteur, nous pouvons calculer la vitesse maximale théorique qu'une voiture peut atteindre, si elle a suffisamment de puissance, sans oublier l'aérodynamisme. Par conséquent, si nous remplaçons les pneus standard par d'autres de taille différente, nous devons être prudents dans le choix afin de ne pas altérer le développement final.
Le réducteur, bien qu'il se trouve à l'intérieur du boîtier du différentiel, ne doit pas être confondu avec le différentiel lui-même, car il a une fonction différente, qui est d'adapter la rotation du moteur à celle des roues.
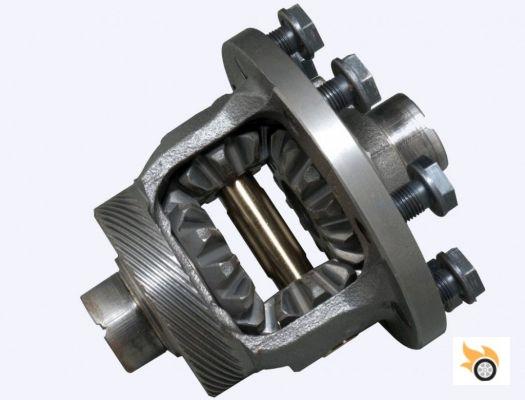
Comment cela fonctionne
Sur la photo, vous pouvez voir un différentiel ouvert, que nous allons prendre comme exemple car c'est le plus courant. La couronne du réducteur serait placée sur le côté gauche, là où se trouvent les trous filetés. Par conséquent, l'ensemble du bloc du différentiel tourne en même temps que la couronne. Si les deux roues tournent à la même vitesse, les engrenages planétaires tourneront à la même vitesse et, par conséquent, les satellites resteront immobiles. C'est-à-dire qu'ils tournent avec l'ensemble, mais pas sur eux-mêmes (ils tournent sur l'axe perpendiculaire à leur axe longitudinal).
Si une roue tourne à une vitesse plus élevée, à cause d'une courbe, d'une traction différente ou d'un dos d'âne, un planétaire tournera plus vite que l'autre, et donc maintenant les satellites tournent sur eux-mêmes, et en même temps ils tournent avec l'ensemble (sur l'axe perpendiculaire à l'axe axial, et sur l'axe longitudinal).
Maintenant que nous avons compris le fonctionnement d'un différentiel, voyons quels sont les types de différentiel et quels sont leurs avantages.
Types
Différentiels ouverts
Il s'agit du différentiel que nous avons vu dans la section précédente. Il remplit les fonctions de base de transmission du couple aux deux roues de manière égale et de compensation de la différence de rotation, mais il présente un inconvénient quelque peu problématique : lorsque l'une des roues a moins d'adhérence que l'autre, tout le couple est dirigé vers la roue qui patine, c'est-à-dire celle qui a moins d'adhérence, ce qui signifie que nous perdons la traction, et donc que nous n'avançons pas.
Il est généralement intégré à la plupart des véhicules pour être de construction simple, économique et robuste, et peut donc être placé à l'avant ou à l'arrière. Quelques exemples : Nissan GT-R sur l'essieu avant, ou BMW dans ses modèles non "M", et pratiquement dans tous les modèles à traction avant, chose apparemment contradictoire en raison de son approche sportive : Porsche a traditionnellement toujours utilisé des différentiels ouverts, sauf dans ses modèles les plus extrêmes.
La transmission du couple entre les roues est théoriquement de 1:1 - en pratique, en raison des frottements, elle peut être d'environ 1,3:1 - également appelé TBR (Torque Bias Ratio), c'est-à-dire une valeur en pourcentage de 0 %. Qu'est-ce que cela signifie ? Qu'il est incapable de transmettre le couple d'une roue à l'autre en cas de glissement. Tout TBR supérieur à 1 signifie que nous avons affaire à un différentiel à glissement limité, qui "prend" le couple de la roue qui glisse et le "donne" à l'autre roue.
Par exemple, un différentiel avec un TBR de 2:1 (33%) signifie qu'une roue peut avoir 66,5% du couple de cet essieu au maximum (ses 50% plus 33% des autres 50%) et 33,5% au minimum (50% - (33% * 50%)). Entre ces valeurs, la roue peut avoir n'importe quel pourcentage, en fonction du type de différentiel et de l'adhérence de la roue. Notez que le concept de TBR est né avec les différentiels Torsen, mais étant un concept intuitif, il est utilisé dans tous les types de différentiel comme comparateur de sa capacité de transfert de couple. Une calculatrice rapide pour l'équivalence entre TBR et pourcentage peut être trouvée ici.

Verrouillable
Pour résoudre en grande partie le problème précédent de perte de traction, un verrouillage (mécanique, hydraulique, pneumatique ou électronique) a été ajouté au différentiel ouvert, plus précisément aux satellites. Comme ils sont bloqués et ne peuvent pas tourner seuls, ils transmettent 50 % de la puissance à chaque roue, au prix de ne pas assurer la fonction de différentiel. C'est pourquoi ce type de différentiel est incorporé dans les véhicules tout-terrain, et son utilisation est recommandée à très basse vitesse, pour franchir un obstacle, car les roues tournent ensemble.
Selon le fabricant, ce verrouillage peut être incorporé à un, deux ou tous les trois différentiels. Il a un TBR 1:1, étant des différentiels ouverts, incapables de soustraire le couple à la roue coulissante. Une vidéo très intéressante, découverte par le maître Javier, montre le fonctionnement de l'Audi Ur-Quattro, avec trois différentiels ouverts, dont deux verrouillables. Vous pouvez le voir dans "Le principe Quattro".
Ce différentiel résout certains des défauts du différentiel ouvert, mais seulement à basse vitesse. Et s'il existait un différentiel qui, en plus de compenser la rotation des roues, transmettait le couple de manière variable en fonction de l'adhérence pour améliorer la traction ? Les différentiels à glissement limité (LSD) sont la réponse.
Différentiel à glissement limité (LSD)
Cette section pourrait faire l'objet d'une encyclopédie entière, en raison de la variété des différentiels autobloquants ou à glissement limité. Résumons-le autant que possible pour le rendre compréhensible. Nous pouvons utiliser différents critères pour classer les différentiels. Nous les diviserons en quatre types :
- Type d'embrayage
- Type visqueux
- Type rigide
- Type actif
Différentiel à embrayage
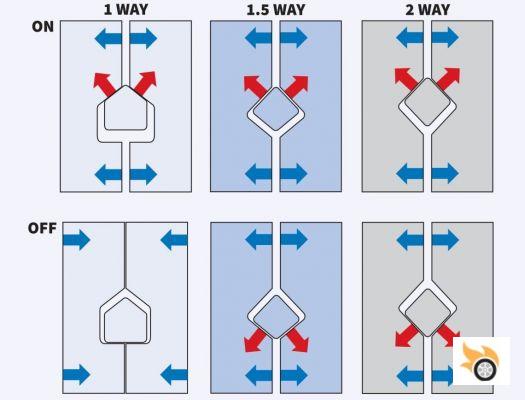
Ce différentiel est un peu compliqué à expliquer, nous allons essayer d'être aussi clairs que possible. Nous partons d'un différentiel ouvert avec l'essieu satellite et ses planétaires, mais nous allons faire quelque chose de différent : l'essieu satellite aura un peu de jeu dans le logement, où nous allons tailler quelque chose comme un triangle. Sur les côtés des planétaires, nous placerons des disques de friction fixés au boîtier du différentiel, et entre eux, des disques en acier fixés au planétaire. Comme les disques sont intercalés, nous devrons incorporer un ressort de pression qui les engage, afin que les roues reçoivent un couple.
De cette façon, lorsqu'une des roues tourne plus que l'autre, une force est générée de sorte que le coin des disques planétaires pousse les disques des deux côtés, bloquant ainsi le différentiel. Ces disques ne sont rien d'autre qu'un embrayage qui, une fois engagé, fonctionne comme un différentiel verrouillé. En situation normale, lorsqu'on tourne, les disques glissent l'un contre l'autre, ce qui permet à une roue de tourner plus vite que l'autre. Comme une vidéo vaut mille images, en voici une avec l'explication.
En fonction de la forme de la coupe du boîtier, on peut parler de différentiels à 1 voie, 1,5 voie ou 2 voies. Les différentiels à sens unique ne fonctionnent qu'en accélération. Les différentiels à 1,5 voies fonctionnent à l'accélération et très peu au freinage. Les différentiels à deux voies fonctionnent aussi bien à l'accélération qu'au freinage, et ne sont pas recommandés sur la route, en raison des problèmes de stabilité qu'ils posent au freinage.
Ils sont généralement utilisés dans les voitures de sport comme différentiel arrière, bien qu'il y ait quelques exceptions. Une mention spéciale mérite le différentiel couronne Audi, utilisé dans certains modèles Quattro, comme la RS4 ou la RS5. Il est utilisé comme différentiel central et est basé sur le même principe que le différentiel à disque, avec quelques légères variations, atteignant dans ce cas un TBR de 1,667:1.
En fonction du matériau de friction des disques, ils peuvent avoir des TBR différents. Il peut varier de 2:1 (33 %) à 400:1 (99,5 %), voire plus. Ce type de différentiel est utilisé par BMW dans ses véhicules "M" et en compétition. Je vous laisse une vidéo où vous pouvez voir la comparaison entre un différentiel ouvert, un autre LSD à 25% (TBR de 1.667:1) et le différentiel à disques. L'inconvénient de ce différentiel est que l'accouplement est quelque peu rugueux et nécessite un entretien, en raison de l'usure des disques. Comme avantage, on peut mentionner que son TBR peut varier de 2 à 400, selon l'adhérence de chaque roue.
Différentiel d'accouplement visqueux ou Ferguson
Il s'agit d'une série de disques, chacun couplé à un arbre - primaire ou d'entrée et secondaire ou de sortie - et immergé dans un fluide visqueux, normalement à forte teneur en silicium. Lorsque l'arbre primaire glisse, il commence à tourner à une vitesse plus élevée, ce qui augmente la viscosité du fluide et, par conséquent, accouple les disques, c'est-à-dire bloque le différentiel. Avec ce type de différentiel, le véhicule se comporte comme s'il avait deux roues motrices, car il ne se bloque et ne transmet la force à l'autre essieu que lorsque l'essieu primaire patine.
Il est généralement utilisé comme différentiel central et son TBR est variable en fonction du nombre de disques, de leur matériau et de leur taille. Si vous avez le temps et voulez mieux comprendre, je vous laisse quelques vidéos de Lancia (partie 1 et partie 2), ils l'ont utilisé comme différentiel central dans leurs Delta et Prisma 4×4.
Différentiel de type rigide
Bien qu'il existe le différentiel épicycloïdal ou planétaire, qui peut également effectuer une répartition du couple (comme dans la Toyota Prius, pour répartir la puissance du moteur thermique entre le générateur électrique et les roues), je ne connais personnellement aucun véhicule qui possède un différentiel de ce type comme différentiel d'essieu moteur. Nous allons donc nous concentrer sur le différentiel de type Torsen, largement utilisé dans de nombreux véhicules.
Comme indiqué, le différentiel Torsen (Torque Sensing) a été breveté en 1958, et son brevet a expiré en 1978, soit vingt ans plus tard. Lorsque le brevet a expiré, le modèle a été mis à la disposition de tous, bien que les propriétaires du brevet aient déposé la marque "Torsen", de sorte qu'aucun fabricant de différentiels de ce type ne peut utiliser ce nom. C'est pourquoi vous avez entendu parler des différentiels Quaife, Wavetrac, Eaton... mais ils sont définitivement des Torsen. Voyons comment cela fonctionne.
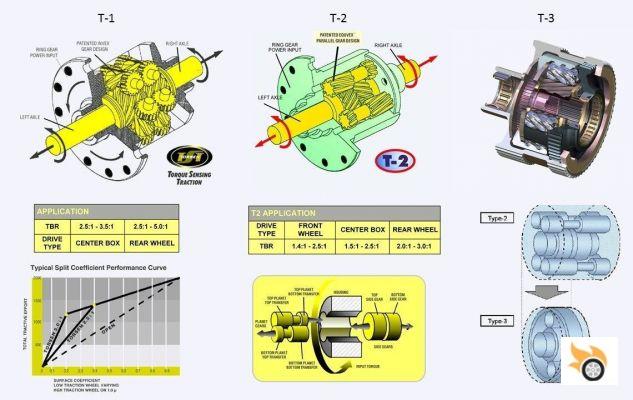
Il existe essentiellement deux types de différentiel Torsen : le T-1 et le T-2. La différence est que dans le T-1 les satellites sont placés perpendiculairement à l'axe différentiel, alors que dans le T-2 ils sont placés parallèlement. Il existe également les variantes T-2R (pour la compétition) et T3 (plus compacte) mais elles ne sont qu'une évolution de la T-2.
Que fournit le Torsen ? Alors que les autres différentiels autobloquants dépendent d'une condition pour commencer à fonctionner, le Torsen fonctionne en permanence, assurant une transition en douceur du couple d'une roue à l'autre. L'accouplement est rigide et continu, il n'y a donc pas de discontinuité dans son fonctionnement comme dans le disque ou le visqueux. L'entretien de ce type de différentiel se limite à la vidange de l'huile après l'intervalle programmé. N'oubliez pas que dans le différentiel à disques, il est également nécessaire de changer les disques de friction en raison de leur usure.
Le T-1 a un fonctionnement plus brutal, bien qu'il supporte plus de couple que le T-2. C'est pourquoi il peut avoir un TBR de 2,5:1 à 5:1. En revanche, le T-2 est plus souple et plus silencieux, ce qui permet des transitions plus douces et plus prévisibles. Son TBR varie de 1,4:1 à 3:1.
Le T-3 a la particularité de distribuer initialement plus de couple à l'un des deux essieux. C'est pourquoi il est utilisé comme différentiel central, réalisant une répartition initiale 65:35 entre l'essieu avant et l'essieu arrière. Audi l'a beaucoup utilisé dans ses modèles Quattro à moteur longitudinal, mais a maintenant introduit le différentiel central à couronne, dont nous avons déjà parlé. Normalement, ce constructeur utilise un différentiel ouvert sur l'essieu avant, un T-3 comme central et un T-2 à l'arrière. Un différentiel autobloquant n'est généralement pas utilisé sur l'essieu avant, car il induirait un effet de couple, la plupart des constructeurs optant pour un différentiel ouvert, bien qu'il y ait des exceptions comme l'Opel Astra OPC, qui possède un différentiel autobloquant à disques. Le Nissan Juke Nismo RS que nous avons testé l'année dernière souffre de cet effet parasite dans la direction.
Comme inconvénient, il faut mentionner la condition d'absence d'adhérence (roue en vol). Dans ce cas, le différentiel Torsen se comporte comme un différentiel ouvert. C'est-à-dire qu'il enverra tout le couple à la roue qui est en l'air, perdant ainsi la traction. Pour éviter cette condition, Wavetrac a conçu un différentiel Torsen avec précharge, qui évite précisément cela.
Différentiels actifs
Ces derniers temps, l'électronique a tout envahi, et les écarts ne peuvent être moindres. Énumérons les trois principaux types de différentiels actifs.
Haldex
Le différentiel Haldex est peut-être le plus célèbre de tous. Il s'agit essentiellement d'un différentiel comme un différentiel à disques, avec des disques de friction pris en sandwich entre eux, où le blocage est géré par une petite pompe à huile qui introduit ou retire de la pression aux disques, de manière à bloquer ou non le différentiel. Cette pompe est gérée électroniquement, on pourrait donc la définir comme un embrayage électro-hydraulique à commande électronique.
L'embrayage Haldex est celui qui a démocratisé la transmission intégrale dans les véhicules à moteur transversal. Rappelez-vous la Volkswagen 4Motion ou la traction Quattro des Audi A3 et TT.
Comme le visqueux, l'Haldex est utilisé comme différentiel central, et les voitures se comportent comme des deux roues motrices (généralement des roues avant motrices). Lorsqu'une condition de faible adhérence se produit, grâce aux capteurs de la voiture, le verrouillage Haldex est activé, transmettant le couple à l'essieu arrière. Dans les premières versions, ce transfert se faisait de manière un peu abrupte, nécessitant un glissement notable de l'essieu avant pour entrer en action. Il en est actuellement à sa cinquième génération, ayant affiné et anticipé son fonctionnement, le rendant pratiquement imperceptible pour le conducteur lorsqu'il entre en action.
Électronique avec vectorisation du couple ou commande de vectorisation du couple
Il existe une autre modalité qui s'impose dans la gamme élevée des voitures de sport à hautes performances. Ce différentiel, assez complexe et lourd, est une version dupliquée du Haldex, mais pour être utilisé sur l'essieu moteur arrière. De chaque côté du différentiel se trouvent des disques, eux-mêmes reliés à une soupape et à une pompe à huile à commande électronique. Lorsque l'électronique considère qu'un couple plus important est nécessaire sur la roue droite (coin gauche, par exemple), elle active la valve de ce côté et la pompe entre en action, envoyant plus de pression aux disques de droite, ce qui permet de transmettre plus de couple à cette roue. On peut faire exactement la même chose avec la roue opposée. C'est comme avoir deux embrayages Haldex, chacun relié à un demi-arbre.
Ces différentiels sont très utiles, car vous pouvez régler très précisément le moment de leur activation et la quantité de couple envoyée à chaque roue. En revanche, le coût, le poids et l'usure sont des points en leur défaveur. Il convient également de noter que dans des conditions de fonctionnement très exigeantes, en raison du frottement des disques et de la pression d'huile élevée, ils peuvent surchauffer et cesser de remplir leur fonction, jusqu'à ce que la température de service soit rétablie. Vous pouvez voir ci-dessous une vidéo avec ce type de différentiel en fonctionnement :
Virtual
Enfin, nous avons les différentiels autobloquants virtuels. Il s'agit de la version la moins chère d'un LSD, car elle est basée sur un différentiel ouvert et sur l'actionnement des freins. Comment fonctionne-t-il ? Rappelons que le différentiel ouvert avait l'inconvénient d'envoyer plus de couple à la roue qui glisse le plus, tout le contraire de ce que nous voulons. Grâce à l'électronique, ce glissement est détecté et les freins sont activés uniquement sur la roue qui glisse. Automatiquement, le différentiel ouvert enverra plus de couple à l'autre roue, car elle offre moins de résistance que celle qui est freinée.
Son principal inconvénient est qu'il produit plus de fatigue dans le système de freinage, surtout en cas d'utilisation intensive. Il est conçu pour une utilisation plus sporadique, en économisant le poids et la consommation des différentiels des types décrits ci-dessus.
C'est quelque chose de très intelligent et d'économique, car il peut être utilisé dans n'importe quel véhicule actuel. En fait, lorsqu'on voit un véhicule avec vectorisation du couple annoncée - à l'exception de ceux qui utilisent un différentiel actif - ce n'est rien d'autre que ce que nous venons de voir : un différentiel ouvert avec un glissement limité par un freinage sélectif. Ce type est utilisé massivement dans la plupart des véhicules du segment des SUV. Vous pouvez le voir en action dans le cas de la Porsche 718 Cayman :
En guise de révision, mentionnons que le freinage sélectif peut également être effectué, même si nous avons une LSD, pour accentuer le couple. Il est utilisé par Audi dans certains de ses modèles Quattro.
Voilà pour notre revue de ce dispositif qui, comme vous l'avez vu, est indispensable pour avoir une bonne traction dans nos véhicules, et compenser les différences de rotation des roues motrices. Je sais que nous avons laissé de nombreux détails dans l'encrier, mais l'idée était d'avoir un aperçu de son fonctionnement et des différentes options offertes par les fabricants pour résoudre diverses situations auxquelles nous pouvons être confrontés, comme avancer sur la neige, ou sortir plus vite d'une courbe sur un circuit en mettant les gaz à fond.
En conclusion, nous pouvons dire qu'un bon différentiel autobloquant peut rendre la conduite beaucoup plus agréable et efficace qu'un différentiel ouvert, ce qui, en fin de compte, est ce que nous recherchons lorsque nous conduisons. C'est pourquoi nous sommes des pistonudos.