Por aquel entonces Ben Bowlby era el director técnico del equipo Chip Ganassi, y tuvo una clarividencia mental. Imaginó un coche radicalmente a todo lo conocido, un coche sin alerones al uso, que generaría toda su carga aerodinámica en sus bajos, a través de efecto suelo, y que tendría menos resistencia al avance que cualquier concepto creado hasta la fecha.
Bowlby comenzó a trabajar en el proyecto bajo el nombre de «DeltaWing», para llegar a presentar su idea en el Salón de Chicago de 2010, donde se pudo ver el primer prototipo, en gris titanio, del concepto.
El DeltaWing era, como su propio nombre indica, un vehículo en forma de triángulo, de «delta», con un eje frontal tremendamente estrecho y un eje trasero mucho más ancho. La idea de Bowlby era pasar alrededor del 80% del reparto de pesos al eje posterior, lo que limitaba las necesidades de ancho de vía en el eje frontal para evitar el vuelco.
No había un solo alerón externo, toda la carga aerodinámica surgía del efecto venturi producido en sus bajos, lo que permitía carreras con coches pegados «morro-con-culo», al eliminarse el «aire sucio» que generan los alerones tras de sí, y que elimina la carga aerodinámica a los coches perseguidores.

El diseño del DeltaWing para la Indy era rompedor, pensado en carreras más eficientes, económicas y también espectaculares, al permitir que los coches fueran más juntos sin perder carga aerodinámica
Gracias a contar con una superficie frontal menor, el coche además contaba con una mejora aerodinámica, en tanto en cuanto tenía menos arrastre, lo que le permitía usar motores más pequeños, con menor consumo de combustible, a igualdad de prestaciones.
En la nota de prensa original del proyecto, Bowlby prometía un coche que sería igual de rápido que los Indy de la época, pero ofreciendo la mitad de resistencia al arrastre, la mitad de coste de producción, la mitad de consumo, y que emplearía, literalmente, la mitad de un motor Indy típico (mitad de tamaño, mitad de potencia, mitad de coste).
El público se quedó impactado. Hubo quien sonrió ante la idea del DeltaWing como obra de la Indy del futuro. Y estaba claro que si el coche era el elegido para mover la competición mono-chasis, supondría un cambio visual radical en el mundo del automovilismo. Ahora bien, también tenía sus detractores, y el grupo de decisión montado por la Indy, el llamado ICONIC, no estaba por la labor de cambiar tanto la cara del campeonato, por lo que a pesar de los beneficios nacionales estadounidenses de que el DeltaWing era un proyecto yanqui, decidieron apostar por la propuesta de Dallara, el coche que se acabaría llamado DW12.
Parecía que 2010 iba a ser el año donde Bowlby vería el final del camino para su proyecto. Pero Ben no se iba a conformar y rendir tan pronto.
Bowlby empezó a trabajar en el desarrollo de su idea por caminos paralelos. Primero ideó y presentó un concepto de competición «Open Source» abierta. La idea de Bowlby era un campeonato donde se partiera del DeltaWing, y donde cada equipo y proveedor técnico pudiera proponer mejoras para integrar en su chasis, mejoras que serían ofrecidas al resto de equipos, y que además serían explicadas a los seguidores del campeonato.
En esas fechas se aproximó Bowlby a Don Panoz, el organizador de las ALMS (American Le Mans Series), para poder valorar la organización de dicho campeonato. La idea era motivadora, pero parecía requerir de demasiado compromiso por parte de demasiados equipos. Bowlby no borraba de su cabeza en cualquier caso sus preceptos de «apertura tecnológica al espectador», estando claramente en contra del secretismo imperante en un deporte donde las carreras las ganan las máquinas, básicamente.
Pero sería algo que estaba sucediendo al otro lado del Atlántico, en Francia más concretamente, lo que cambiaría la suerte del DeltaWing. En 2010 el ACO empezó a pensar en nuevas maneras de atraer fabricantes e innovación tecnológica a las 24 Horas de Le Mans. El problema para el ACO, cuando estaba desarrollando las nuevas normas de LMP1 con su sistema de limitación por consumo de combustible, estaba en ofrecer al mismo tiempo un vector de tracción mediática para la carrera. A alguien, en el seno de la organización, se le ocurrió entonces la idea del «Garage 56».

El ACO recibió con los brazos abiertos al DeltaWing como participante para el Garage 56, aunque el coche no era más que un prototipo de plástico sin chasis ni motor cuando se mostró en 2011
El concepto del «Garage 56» es sencillo: Se trata de la admisión de un equipo participante en las 24 Horas de Le Mans con un coche que no se ajuste a las reglamentaciones de LMP o GT, pero que ofrezca un vistazo a tecnologías de automoción interesantes de cara al futuro, tanto para las carreras como para el mundo civil. El equipo que se interesase en participar en dicha división obtendría el visto bueno por parte del ACO, que se encargaría de modular, junto con los ingenieros, el rendimiento del coche para que corriese más que un LMP2 pero menos que un LMP1.
Aunque originalmente esos eran todos los preceptos básicos, el ACO no escondía que, además, el Garage 56 podía ser la puerta de entrada mediática para fabricantes que se comprometieran a acabar corriendo en LMP1 al cabo de unos años. A fin de cuentas, el Garage 56 permitía una gran exposición mediática, independientemente del rendimiento del coche.
Don Panoz animó a Bowlby a entablar conversaciones antes de que acabara 2010 con el ACO. El ACO rápidamente vio que el proyecto DeltaWing encajaba perfectamente en su visión del Le Mans tecnológico, y rápidamente, todavía en un plano secreto, se firmó un acuerdo para colocar el coche en la parrilla de Le Mans de 2012.
Nadie decía nada oficialmente, pero Ben Bowlby deslizaba a algunos medios y conocidos (entre ellos estaba un servidor) una imagen a principios de 2011 en la que se podía ver un DeltaWing con techo y faros. Mi primera reacción fue… «¿Qué demonios?». Estaba claro que el DeltaWing había mutado a coche de resistencia, pero la realidad es que no había campeonato que lo pudiera acoger como tal. Tras preguntar a gente del mundillo de la resistencia, rápidamente supimos del tema del Garage 56. Bowlby se asociaba con Don Panoz y el equipo «All American Racers» para construir un coche para el que Michelin haría unos neumáticos específicos.
El proyecto se anunciaba a la multitud en la semana previa a Le Mans 2011, donde se mostraba ya un prototipo del coche sin techo, en color rojo vibrante. Pero el desafío estaba por delante al completo. Bowlby sólo tenía un render y doce meses para crear un coche rarísimo desde cero.
Las cosas se le pusieron de cara rápidamente ese mismo 2011. Aston Martin tomaba parte como fabricante integral de un coche de LMP1 ese año, tras haber tenido cierto éxito con chasis desarrollados por Lola. Pero el AMR-One resultaba un genuino desastre. David Richards, a través de Prodrive (conviene recordar que Richards también es accionista y directivo en Aston Martin), intentó abarcar demasiado, y además de crear un chasis completamente nuevo, creó un motor de seis cilindros en línea sobrealimentado. El coche resultó un ridículo completo.

El chasis de partida del DeltaWing sería el creado por Prodrive para el Aston Martin AMR-One
Prodrive no tenía capacidad para desarrollar el seis cilindros en línea de dos litros sobrealimentado, y sumó a ello la idea de lanzar el coche a correr sin haber acumulado prácticamente kilómetros de experiencia, lo que causó un abandono en Spa, y otro mucho más doloroso en Le Mans, donde apenas pudieron rodar cuatro vueltas antes de que el motor se rompiera. Sin recursos económicos disponibles, el proyecto AMR-One se abandonó inmediatamente, y cuatro chasis del coche quedaron sin salida en Prodrive.
Era justo la oportunidad que Bowlby necesitaba. El británico se puso en contacto con Richards, y adquirió el chasis de fibra de carbono del AMR-One como base para el DeltaWing. El proyecto del coche tenía ya su punto de partida, de manera mucho más económica, y además con la garantía de contar con un chasis abierto que ya estaba homologado ante muchas de las pruebas de impacto.
Obviamente, había mucho que cambiar del coche, para empezar en el tren delantero. Bowlby re-adaptó sus planos originales del DeltaWing para ensanchar el cuerpo central del coche hasta ajustarse al diseño del monocasco de Prodrive. Se creó a partir de ahí toda una nueva sección frontal, en forma de subchasis, con un ancho de vías delantero de sólo 600 milímetros.

El eje delantero sólo tenía una vía de 600 milímetros, y empleaba elementos específicamente desarrollados para la ocasión
Como el diseño de cualquier otro coche, Bowlby partió de crear la geometría deseada para el tren delantero y desarrolló a partir de ahí los requerimientos de neumáticos, llantas y mangueta. Para aligerar peso, decidió apostar por una mangueta delantera equipada con un buje de tres espárragos únicamente, dispuestos en el mismo formato de… ¡de un Citroën 2CV!
Como no había proveedores que tuvieran disponibles llantas, neumáticos o frenos para dicho esquema, se tuvo que trabajar en llantas específicas, calzadas con gomas de competición Michelin 10/58 R15, es decir, 15 pulgadas de diámetro, y sólo 100 milímetros de sección.
En especificación de Le Mans, sólo el 25% del peso del DeltaWing iba a caer en el eje frontal. Esto hace que sólo el 40% de la carga de frenado sea cosa del eje frontal, algo muy inferior a lo normal. En cualquier caso, se equiparon discos de freno carbonocerámicos (especialmente agradecidos para trabajar a altas temperaturas, producidas por un confinamiento especialmente estrecho en el eje delantero), mordidos por pinzas rígidas de aleación de aluminio con cuatro pistones.
El otro gran cambio del coche estaba en el eje trasero, en la transmisión. Bowlby contaba con emplear un motor mucho menos potente que el diseñado por Prodrive, lo que debía permitir aligerar peso en el eje trasero con una caja de cambios más sencilla. Así se desarrolló una caja de cambios desde cero por parte de EMCO. Se trata de una caja de cinco relaciones transaxle que pesaba sólo 33 kilogramos e integraba un diferencial activo con control de guiñada. Para ello, cada semieje de salida del cambio a las ruedas traseras contaba con un engranaje externo. Ambos engranajes estaban unidos por una barra longitudinal, cuyo giro estaba controlado por un servomotor. Cuando el coche tomaba una curva, la diferencia de velocidad de giro de la rueda exterior a la curva respecto a la interior se transformaba en rotación de esta citada barra longitudinal. En función de la libertad de movimientos de esta barra de conexión, otorgada por el servomotor eléctrico, el coche bloqueaba más o liberaba más el eje trasero. El resultado es un coche que puede ser más o menos sobrevirador.
Como Ben Bowlby explicaba en 2012, el coche se diseñó como netamente sobrevirador, permitiendo al conductor controlar el sobreviraje mediante contravolanteo y con el diferencial activo trabajando a su favor. Decía Bowlby que de haber diseñado un coche más subvirador, habría sido más lento y complicado de manejar.
La caja de cambios fue un desarrollo a medida, con diferencial con reparto inteligente del par
Para simplificar el diseño de la trasera y no tener que desarrollar elementos del sistema de propulsión especialmente caros, Bowlby decidió por no emplear como elementos autoportantes ni al motor ni a la caja de cambios, por lo que tuvo que crearse una jaula de tubos de acero al cromomolibdeno para soportar motor, caja y suspensión trasera.
A nivel aerodinámico, todo el coche se diseñó pensando en la máxima eficiencia posible, creando la carga a base de efecto suelo, con grandes túneles libres de los problemas de regulaciones fijas que el ACO si impone en las otras categorías de prototipos.
Pero claro, había que motorizar al proyecto, y de paso conseguir algo de dinero. Bowlby giró entonces su vista a los especialistas de RML. Desde un buen principio, Bowlby planteó el DeltaWing como un coche con un motor de cuatro cilindros de gasolina sobrealimentado con inyección directa. Básicamente, un GRE (global race engine) de los impulsados por la FIA, y que se usan en el WTCC y el WRC. El uso de un motor de ese tipo abría las puertas a que cualquier fabricante grande pudiera interesarse en el proyecto.
Antes de atar a ninguna marca, RML ofreció un propulsor de estas características directamente tomado del Chevrolet Cruze del mundial de turismos, con el que se montó el primer DeltaWing prototipo, que se estrenó satisfactoriamente rodando en Sebring.
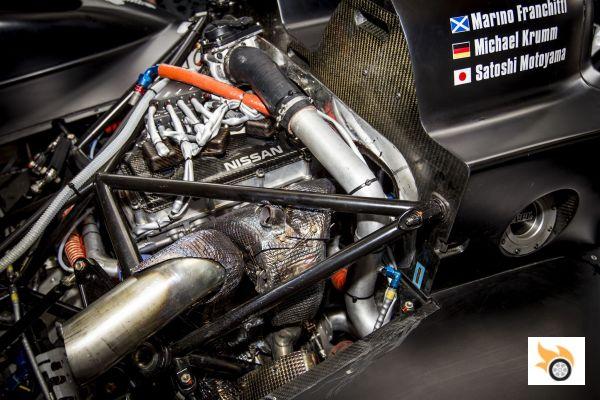
Con la ayuda económica de Nissan, RML creó un motor de 1,6 litros, inyección directa y sobrealimentación por turbo a medida de las necesidades del DeltaWing
Y es aquí cuando entra Nisan en juego. No se sabe muy bien cómo, pero Darren Cox, responsable deportivo de Nissan, fichado para devolver la imagen de marca deportiva a la compañía nipona, recibió un contacto por parte de RML. Cox era ya un seguidor fiel del proyecto DeltaWing, y quiso dar su apoyo con Nissan al proyecto ya que encajaba dentro de los preceptos básicos de la compañía para sus nuevos programas deportivos: Hacer algo distinto a todos los demás, hacer algo llamativo y mediático, hacer algo con poco presupuesto e innovador.
Al mismo tiempo, prácticamente (no tenemos claro si fue antes el huevo o la gallina, la verdad), RML aprovechó para colarle además a Nissan el proyecto del Nissan Juke R, que se encargarían de realizar también para la firma nipona.
El caso es que con dinero fresco de Nissan disponible, Bowlby pudo crear una evolución específica del motor de RML para Le Mans, con la idea de aligerar peso y mejorar en fiabilidad de cara a aguantar las 24 horas, ofreciendo además una curva de par más plana y beneficiosa para ajustarse a las condiciones de pista y los requerimientos de conducción de los pilotos.
El motor resultante resultó ser muchísimo más ligero que el original de RML, y suficientemente probado como para aguantar las 24 Horas de Le Mans. Con 300 caballos de potencia, 475 kilos de peso y la mitad de masa no suspendida que un coche típico de LMP, el DeltaWing era capaz de alcanzar los 307 por hora en la recta de Le Mans, hacer tandas de 11 vueltas con 40 litros de combustible en La Sarthe (una media de consumo de 27 litros cada 100 kilómetros, muy inferior a la de sus rivales), y marcar un 3:42 en calificación en las 24 Horas, a la altura de los mejores LMP2.

El Cx de sólo 0,35 lo convierte en uno de los coches de carreras con más bajo arrastre aerodinámico de la historia
Con un Cx de sólo 0,35, el DeltaWing además se aprovechaba de aerodinámica activa, con un flap de Gurney que aparecía en las zonas donde hacía falta más carga aerodinámica, como las frenadas, en el borde de salida de la trasera de la carrocería.
Al coche se le obligó a usar retrovisores tradicionales, lo que empeoraba la aerodinámica un 8%, según Bowlby. Y es que originalmente se iban a emplear cámaras y pantallas para sustituirlos. Por otra parte, el coche resultaba ser el 29º más rápido en las «eses» Porsche, las curvas más complicadas por carga aerodinámica. En cualquier caso, el 3:42 no era una demostración de potencial al uso, ya que el ACO dejó bien claro al equipo DeltaWing que el coche tenía que rodar a ritmo de 3:45 en carrera. Cualquier exceso en ese sentido podría acabar con cambios en el diseño del coche o mayores bridas. Así que en carrera no se vio al DeltaWing pasar de dicho ritmo. Por otra parte, la relación final del cambio tampoco estaba ajustada a Le Mans, por lo que la velocidad máxima todavía era mejorable.

El coche resultó mucho más rápido de lo esperado, por lo que Nissan tuvo que hacerlo girar al ritmo marcado por el ACO, de 3:45. La carrera acabó mal tras ser embestido por un Toyota tras 75 vueltas en carrera
El experimento de Le Mans, en todo caso, acabó mal. Y es que tras 75 vueltas, un doblaje por parte del Toyota TS030 de Kazuki Nakajia en las eses Porsche acababa con el coche siendo embestido y terminando contra las protecciones. El problema estaba en el color del coche, que le hacía poco visible a la caída de la noche, por lo que la historia acabó mal por una desacertada elección cromática.
En todo caso, el punto de Ben Bowlby sobre el coche de baja carga aerodinámica había quedado demostrado. El DeltaWing fue reconstruido para tomar parte en el Petit Le Mans con Lucas Ordoñez entre sus pilotos, donde logró una excelsa quinta posición final, en parte inesperada por los ajenos al proyecto.

En el Petit Le Mans de Sebring, el DeltaWing logró una espectacular quinta posición final
A partir de aquí, la historia de Bowlby, Nissan y el DeltaWing se complica. Bowlby quería ir más allá con la evolución de su concepto, y rápidamente empezó a pensar cómo extrapolar las lecciones aprendidas en Le Mans 2012 en un LMP1 para 2015 (que se acabaría llamando GT-R LM Nismo, ¿os suena?), pero AAR y Don Panoz no estaban por la labor de apoyar un proyecto de este tipo.
Así las cosas, Nissan fichó a Bowlby como asesor técnico de competición para trabajar codo con codo con Darren Cox. En 2014 alinearían el Zeod RC, una evolución híbrida eléctrica del DeltaWing, mientras se seguía cocinando la idea del LMP1. Pero por su parte Don Panoz y AAR continuaban con la producción de derivados del DeltaWing original, alineándolos en competiciones estadounidenses, mientras emprendían batallas legales contra Nissan por haberse llevado a su ingeniero estrella e ideólogo tras el concepto DeltaWing a su casa.
Al final, bajo nuestro humilde punto de vista, DeltaWing y Ben Bowlby son conceptos inseparables, siendo el primero el hijo de la mente del segundo. Apréndete bien la lección de hoy del DeltaWing, pues te servirá de mucho para comprender el Zeod RC, y sobre todo las razones tras el diseño del GT-R LM Nismo, del que te hablaremos en profundidad a nivel técnico la semana que viene.