Search
Search
Search
Search
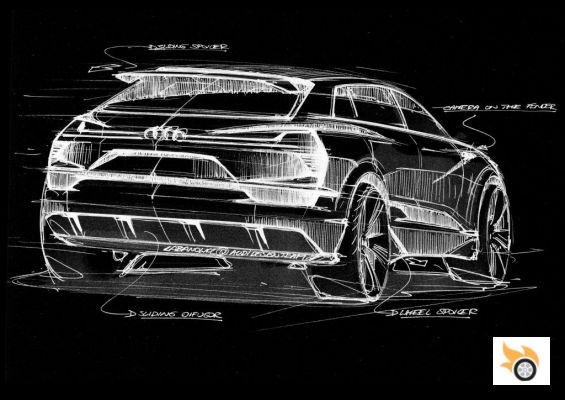
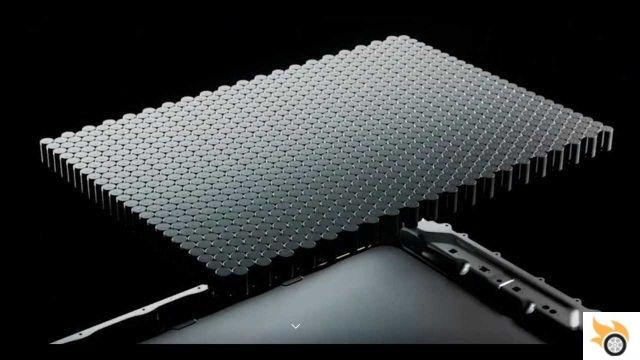
Se trata del «e-tron quattro concept», un adelanto muy fiel al coche de producción que veremos en pocos años en los concesionarios de Audi en forma de SUV...

Me refiero a las diferentes categorías que concurren a las 24 Horas de Le Mans, con diferentes tipos de coches. Hay cuatro categorías en Le Mans, que se corresponden...

Introducción Bienvenidos a nuestro artículo sobre la importancia de revisar un coche antes de emprender un viaje. En este texto,...
![]() Sitemap 2024 / pistonudos.com
Sitemap 2024 / pistonudos.com ![]()
![]()
![]()




























![Resetear Tesla: Cómo hacerlo fácilmente [Actualizado]](/images/posts/17b9ec0356b803801eae09fe99882a0d-0.jpg)